



Features
Videos
Options
Hiwonder
Binocular Depth Camera DaBai 3D Vision Camera SLAM Smart Car ROS Robot


Product SKU: HW2019472
- Indoor and outdoor availability
- Support ROS1/ROS2
- Binocular structured light
- Small measurement blind spot
- Support Raspberry Pi/ JETSON/ Windows
Available:
Only 1000 items in stock
In stock
In stock
Out of stock
Back in stock
$149.99
Save
% $-149.99

Product Description
Dabai DCW is built on binocular imaging technology and delivers high-precision depth images within the range of 0.2-2.5m. Featuring a modular design, the camera integrates a depth computing platform, eliminating the need for additional computing power for depth processing. It also supports multi-platform applications such as Raspberry Pi, JETSON, and Windows PC.
Support Bilingual: Chinese & English
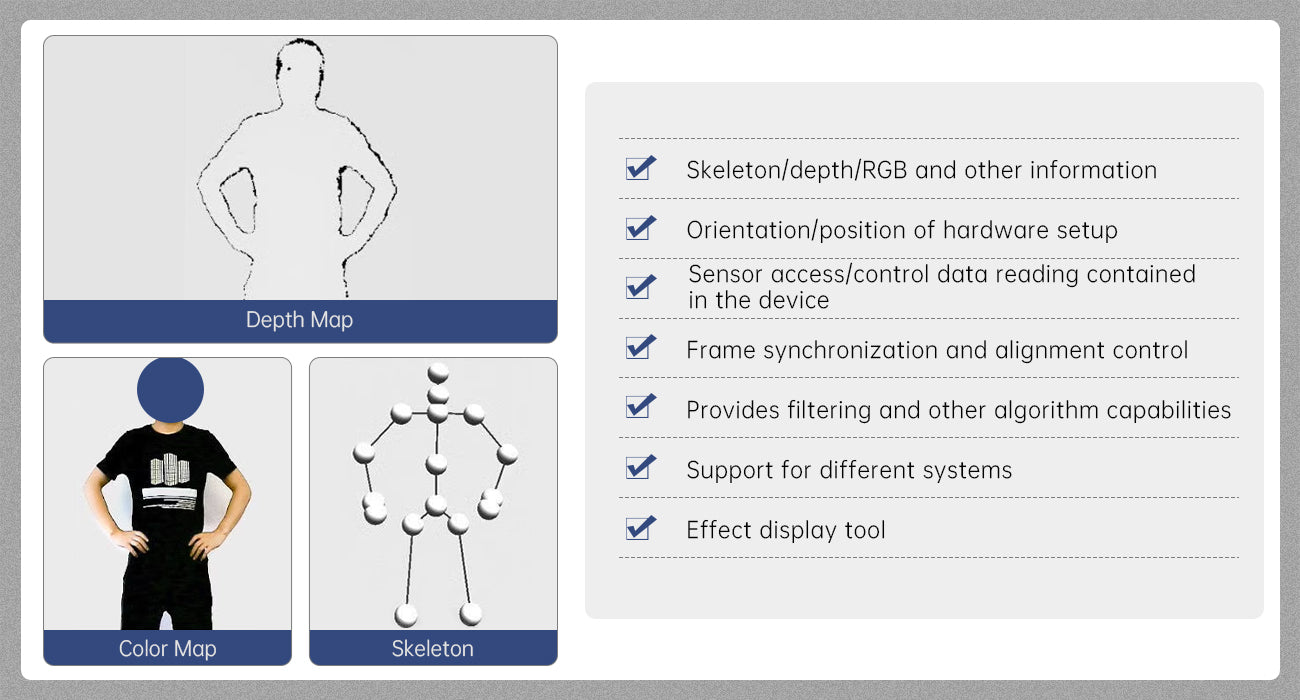
Basic function: access device info, obtain basic data flow and control devices.Advanced function: synchronize and align data frames, retrieve point cloud data, and record and play back data.
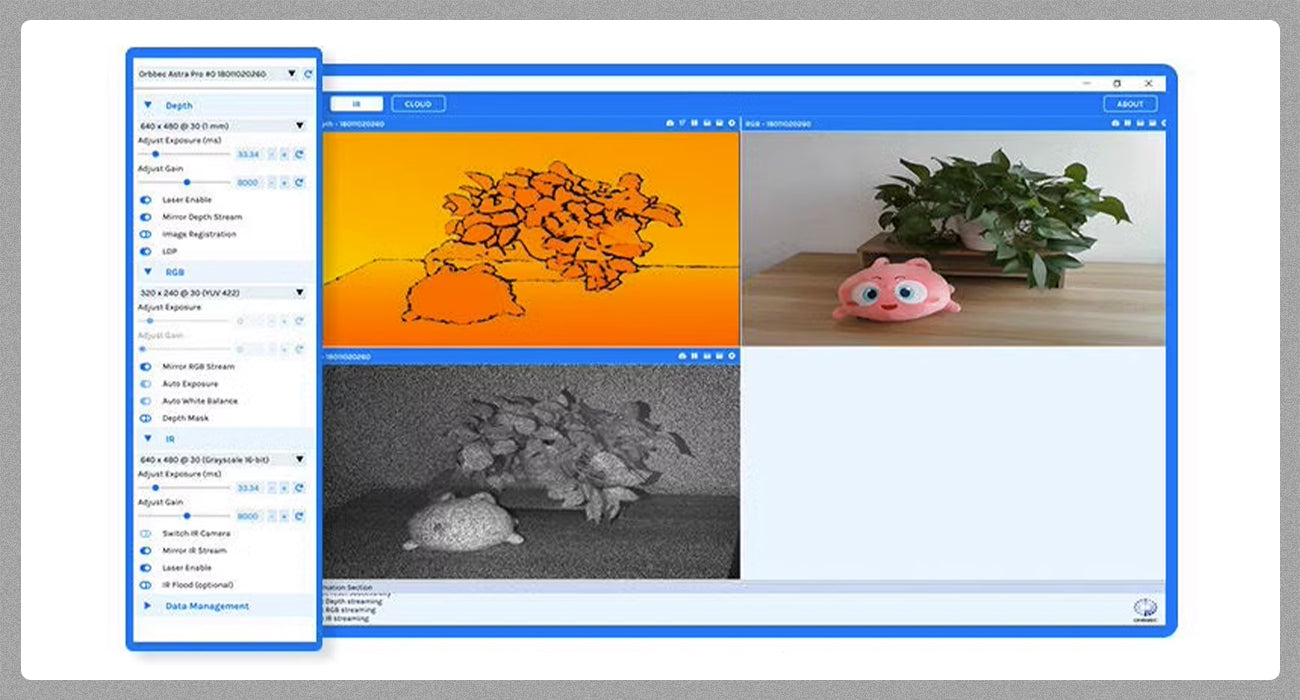
[SDK] Provide Better Development Experience
A software development package is available for various platforms (Windows, Android, Linux), allowing you to access recognized information for further development purposes.

Support ROS1/ ROS2
The depth camera is compatible with both ROS1 and ROS2 systems and includes SDKs tailored for these platforms.

Compatible with Multiple Controllers
Support Raspberry Pi, NVIDIA Jetson Series controller, PC computer, industrial personal computer.

Support Multiple Robots
Support ROS/ Raspberry Pi/ Jetson robots.

| DaBai DCW Binocular Structured Light Depth Camera | |||
| Basic parameters | Model | DaBai DCW | |
| 3D technology | Orbbec active binocular structured light | ||
| Operating range | 0.2m-2.5m | ||
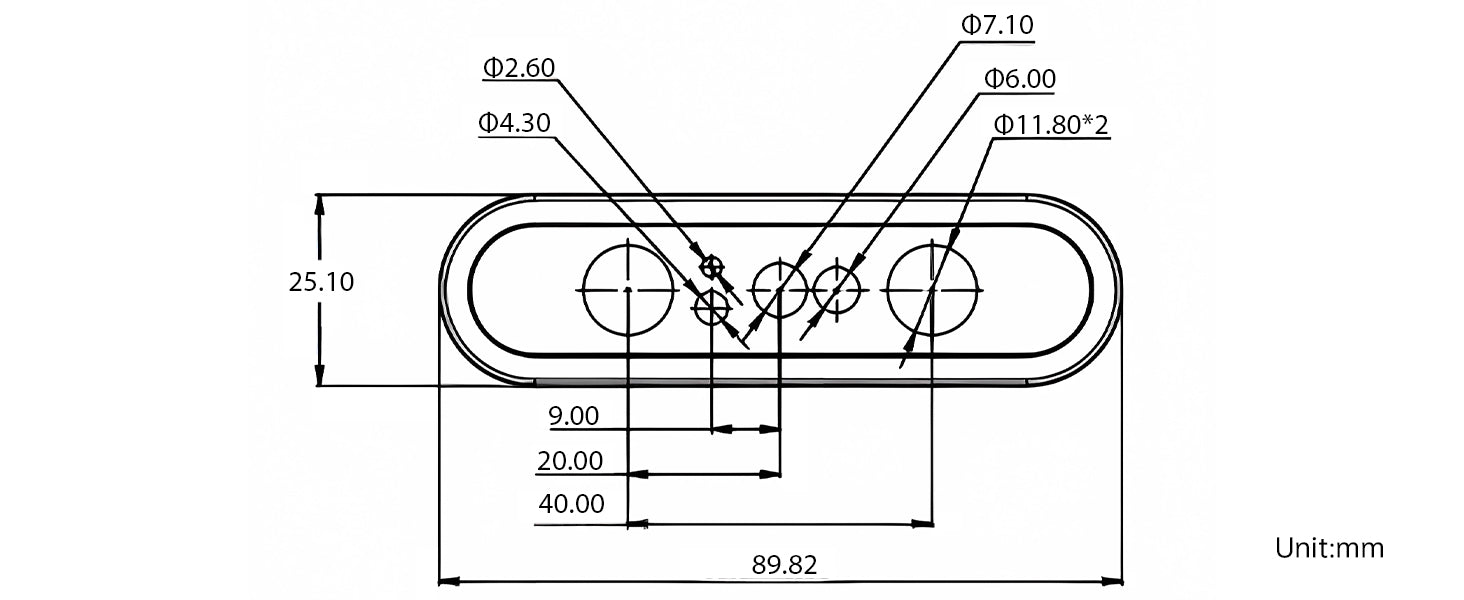
| Size | 89.82*25.10*25.10mm | ||
| Power consumption | Average power consumption<2.3W, Maximum power consumption<5.0W (During working state, the duration every 33ms is ≤ 3ms.) | ||
| Baseline | 40mm | ||
| Port type | USB Type-C | ||
| Communication/ power supply method | USB 2.0 | ||
| Operating temperature | 10℃-40℃ | ||
| Operating humidity | 5% - 95%RH | ||
| Storage temperature | -20℃ - 70℃ | ||
| Relative accuracy | 1.0%(center 77.4% area) @ 200mm 1.0%(center 81% area) @ 500/1000/1500mm 1.1%(center 81% area) @ 2000mm 1.2%(center 81% area) @ 2500mm |
||
| Depth image | Resolution@ frame rate | 1024x768x16bits@ 5/10fps 640x480x16bits@ 5/10/15/30fps | |
| Depth FOV | H79° V62° D91°±3° | ||
| Infrared image | Resolution | 1024x768x8bit/16bit/24bit@ 5/10fps 640x480x8bit/16bit/24bit@ 5/10/15/30fps |
|
| Infrared FOV | H79° V62° D91°±3° | ||
| Color image | Resolution@ frame rate | 16:9 | 1920×1080@ 5/10/15/30fps&MJPEG 1920×1080@ 5fps&YUY2 1280×720@ 5/10/15/30fps&MJPEG 1280×720@ 5/10fps&YUY2 640×360@ 5/10/15/30fps&MJPE |
| Color FOV | 4:3 | 1440×1080@ 5/10/15/30fps&MJPEG 1440×1080@ 5fps&YUY2 1280×960@ 5/10/15/30fps&MJPEG 1280×960@ 5fps&YUY2 |
|
| Others | Image format | MJPG/YUY2 | |
| Supporting OS | indows 10/ Android 8/ Ubuntu 18.04 | ||
| SDK | OpenNI2/ ROS(Melodic 1.14.12) | ||
| Application scenario | Indoor/ outdoor | ||
| Safety | Class 1 laser | ||
| Waterproof and dustproof | Basic dustproof | ||
| Working principle | Binocular structured light | ||
| Weight | 88.1g | ||
| Fixed mode | M2.0 screw | ||
| Authentication | CE/ FCC/ RoHS/ Class 1 | ||
Application Scenario

Dabai DCW Depth Camera Packing List

| Item | Specification |
| Basic parameters | Model: DaBai DCW; 3D technology: Orbbec active binocular structured light; Operating range: 0.2m-2.5m; Size: 89.82*25.10*25.10mm; Power consumption: Average power consumption<2.3W, Maximum power consumption<5.0W (During working state, the duration every 33ms is ≤ 3ms.); Baseline: 40mm; Port type: USB Type-C; Communication/ power supply method: USB 2.0; Operating temperature: 10℃-40℃; Operating humidity: 5% - 95%RH; Storage temperature: -20℃ - 70℃; Relative accuracy: 1.0%(center 77.4% area) @ 200mm; 1.0%(center 81% area) @ 500/1000/1500mm; 1.1%(center 81% area) @ 2000mm; 1.2%(center 81% area) @ 2500mm; |
| Depth image | Resolution@frame rate: 1024x768x16bits@5/10fps; 640x480x16bits@5/10/15/30fps; Depth FOV: H79° V62° D91°±3°; |
| Infrared image | Resolution: 1024x768x8bit/16bit/24bit@5/10fps; 640x480x8bit/16bit/24bit@5/10/15/30fps; Infrared FOV: H79° V62° D91°±3°; |
| Color image | Resolution@frame rate: 16:9 1440×1080@5/10/15/30fps&MJPEG 1440×1080@5fps&YUY2 1280×960@5/10/15/30fps&MJPEG 1280×960@5fps&YUY2 Color FOV: 4:3 1440×1080@5/10/15/30fps&MJPEG 1440×1080@5fps&YUY2 1280×960@5/10/15/30fps&MJPEG 1280×960@5fps&YUY2 |
| Others | Image format: MJPG/YUY2; Supporting OS: indows 10/ Android 8/ Ubuntu 18.04; SDK: OpenNI2/ ROS(Melodic 1.14.12); Application scenario: Indoor/ outdoor; Safety: Class 1 laser; Waterproof and dustproof: Basic dustproof; Working principle: Binocular structured light; Weight: 88.1g; Fixed mode: M2.0 screw; Authentication: CE/FCC/RoHS/Class 1; |
Questions & Answers
Have a Question?
Be the first to ask a question about this.

















